Soddisfatto dal volo del Fw-190 ho deciso di acquistare un altro modello della classe 60.
Anche questo modello è rognosetto nel bilanciamento quando si usa la motorizzazione elettrica. Per questo motivo avrei voluto montare il collaudato modulo sonoro di Benedini ma, dopo diversi tentativi, ho dovuto desistere perchè lo spazio a disposizione non permette l'uso corretto dei due altoparlanti da 10cm.
Ho dovuto risolvere il problema della distribuzione dei pesi anteriormente in maniera molto diversa.
Essendo io, fondamentalmente, un volatore della domenica, non posseggo ancora quella sicurezza in atterraggio quando ho a che fare con modelli con carico alare importante. Tutto ciò si traduce spesso in atterraggi più veloci del dovuto e con conseguenze spesso catastrofiche. I carrelli sono i primi ad accusare i colpi e spesso si portano dietro anche le sedi alari e dintorni.
Ovviamente il problema non risiede solo nella velocità di atterraggio ma è sicuramente dovuto anche a questo. Quindi, visto che la tecnologia lo permette, ho deciso di installare un tubo di Pitot per provare ad avere qualche aiuto sulla gestione della velocità in fase di atterraggio.
Costruzione dell'alloggiamento del pacco LiPo
Non volendo aggiungere pesi anteriormente ho dovuto fare uso di un'ogiva di metallo ma non è bastato. Bisognava in ogni modo spostare il pacco batteria il più avanti possibile: a ridosso del parafiamma.
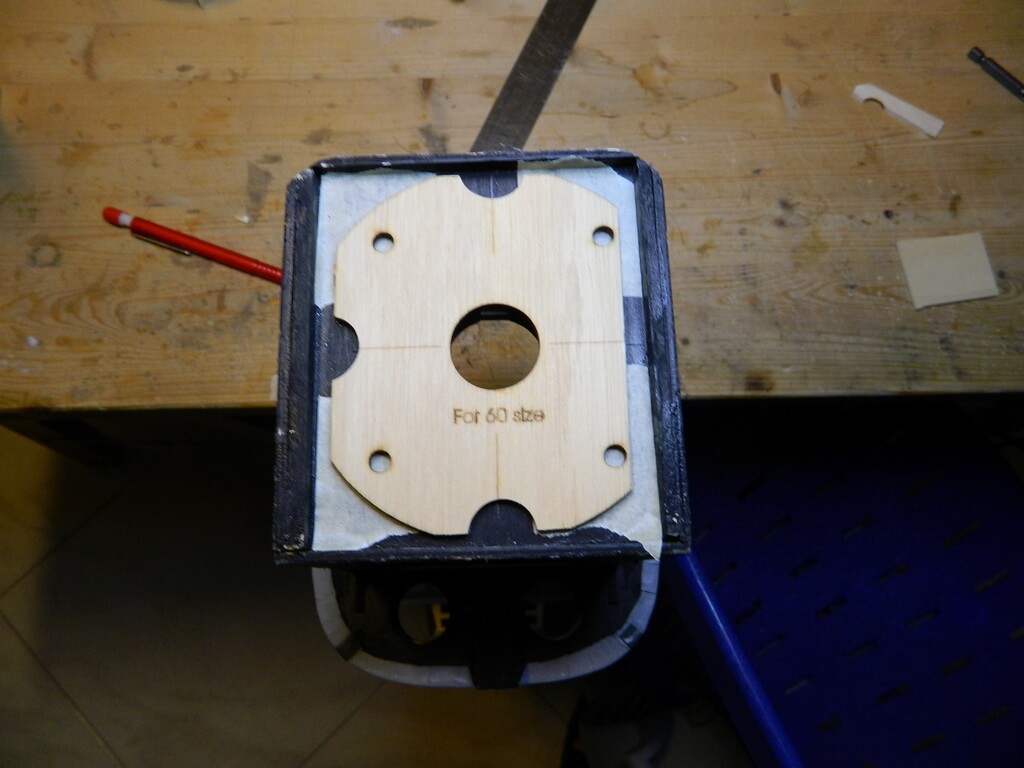



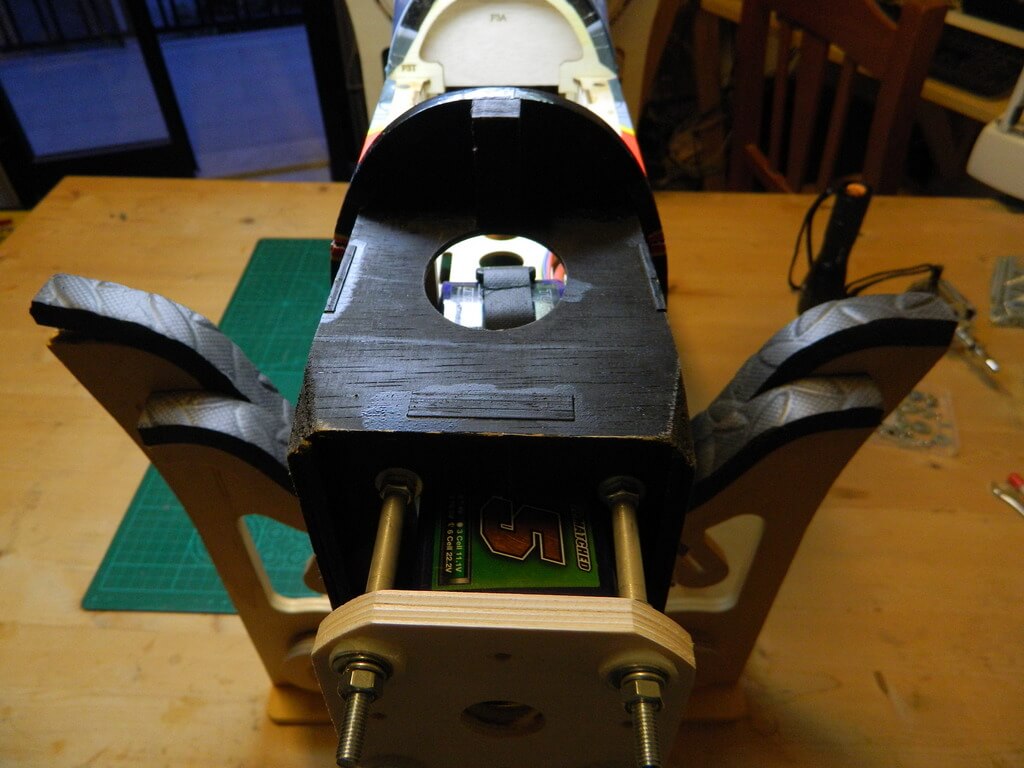
Le dimensioni dell'alloggiamento sono calcolate in funzione dei pacchi LiPo che uso correntemente su questo tipo di modelli ovvero Nanotech 6s 4500mA 25-50c di HobbyKing



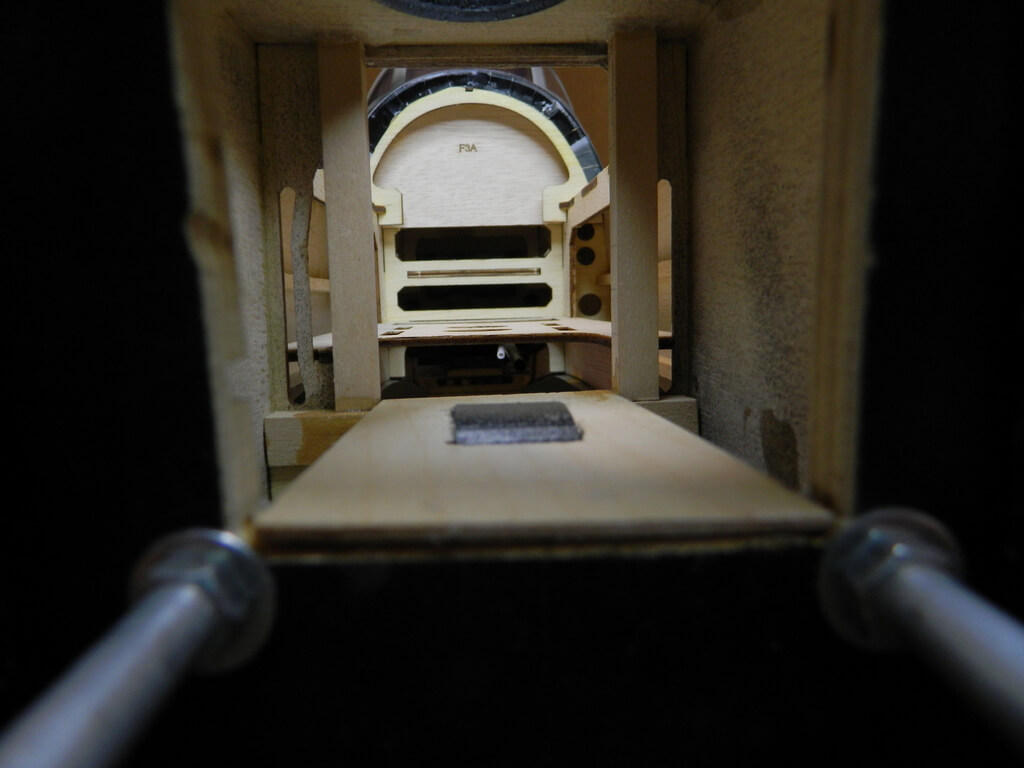

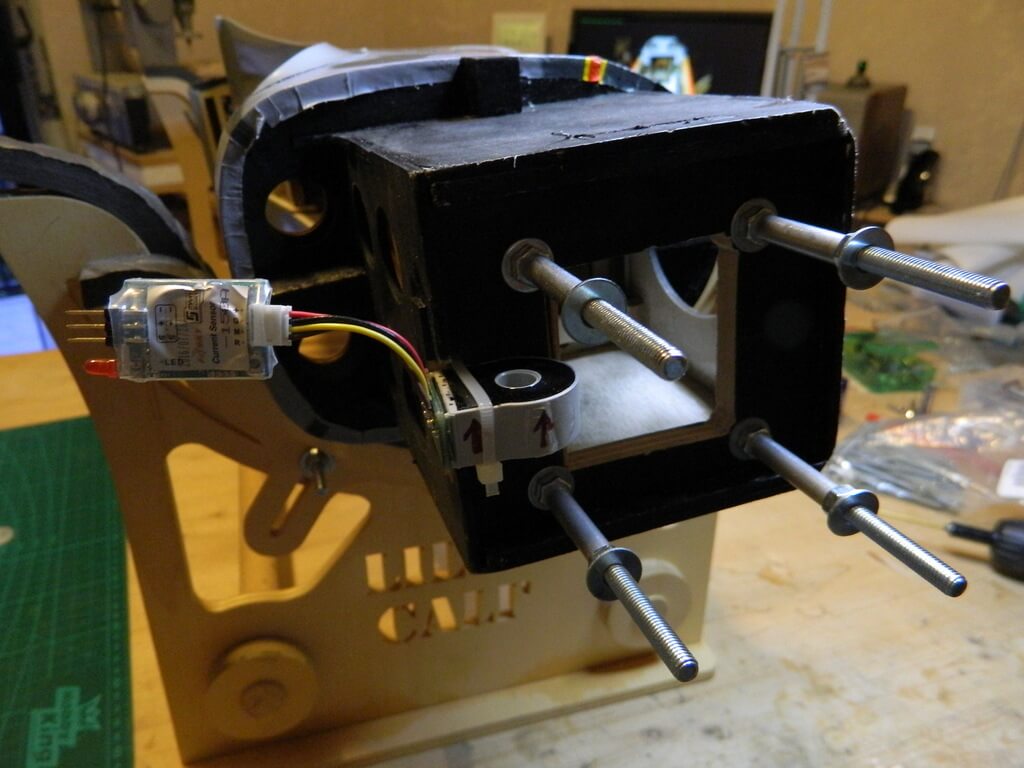
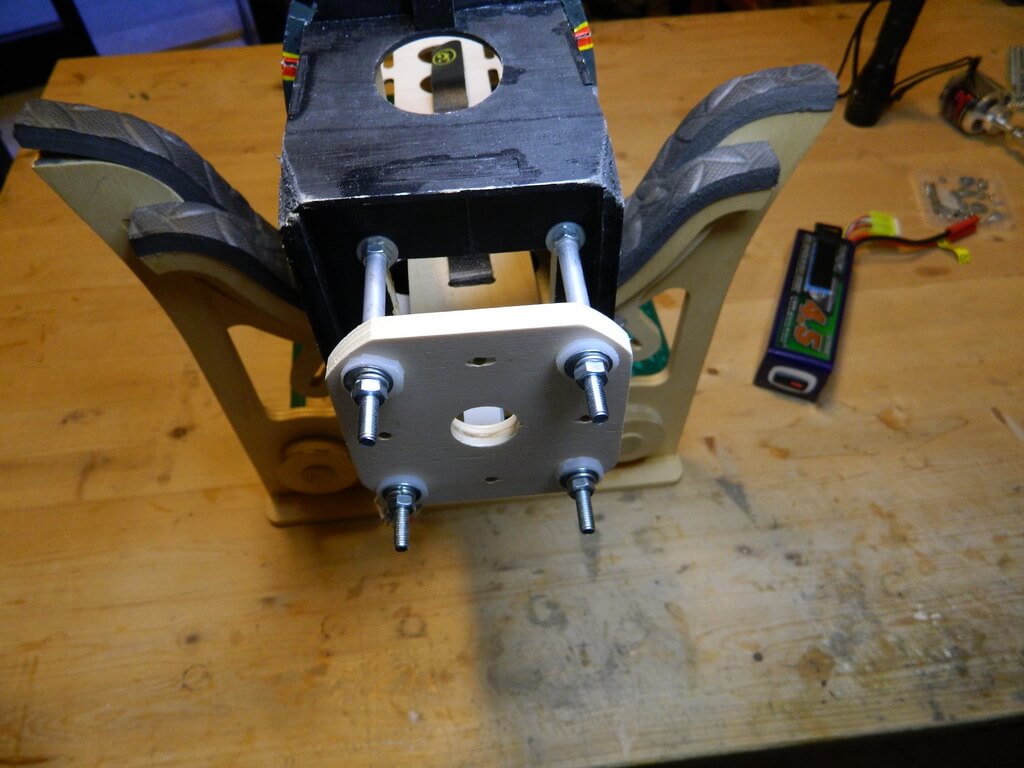
Come distanziali ho usato tubetti di alluminio da 6mm con foro interno da 5mm
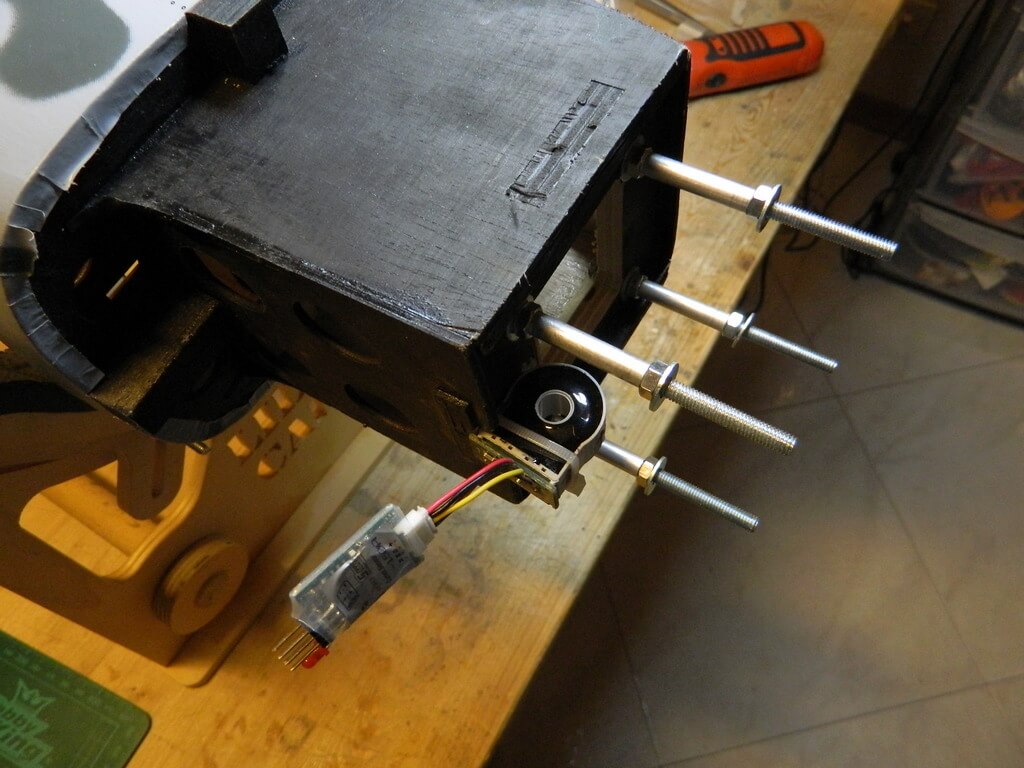

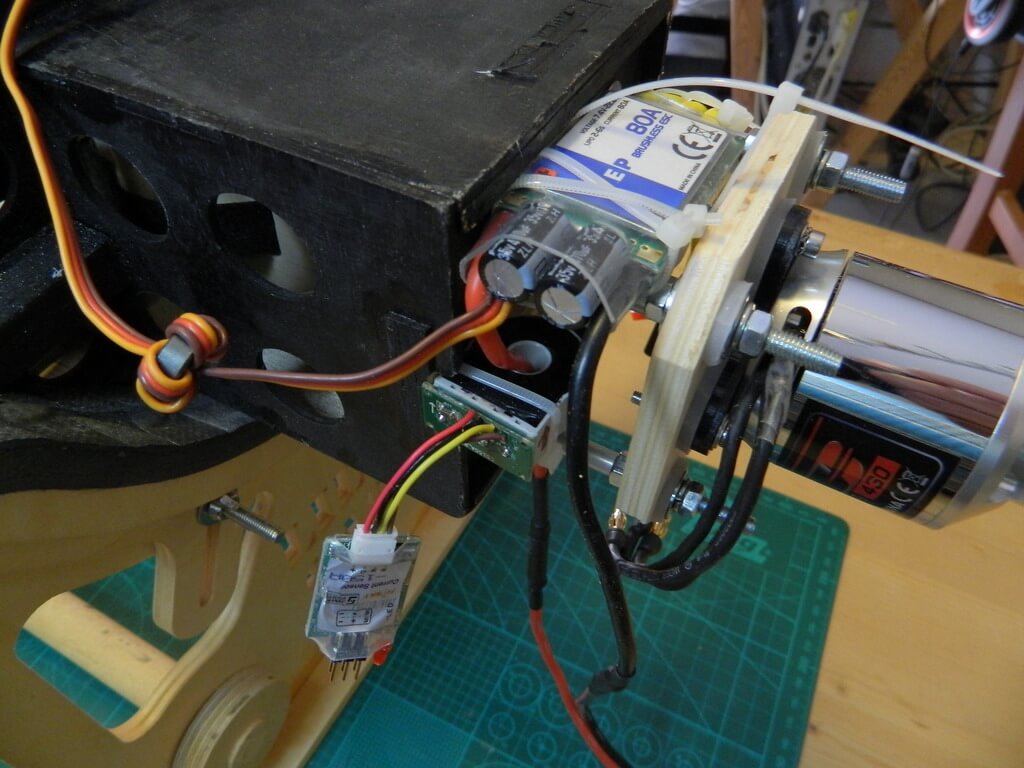
Per ridurre la trasmissione delle vibrazioni dal motore al parafiamma e quindi ridurre il rumore ho realizzato le guarnizioni visibili in foto da un foglio di silicone da 3mm di spessore aquistato su Amazon.



Per fare in modo che il pacco batteria non venga danneggiato dalla rotazione del brushless, ho accorciato quanto più possibile la parte che sporge anteriormente dell'asse del motore.

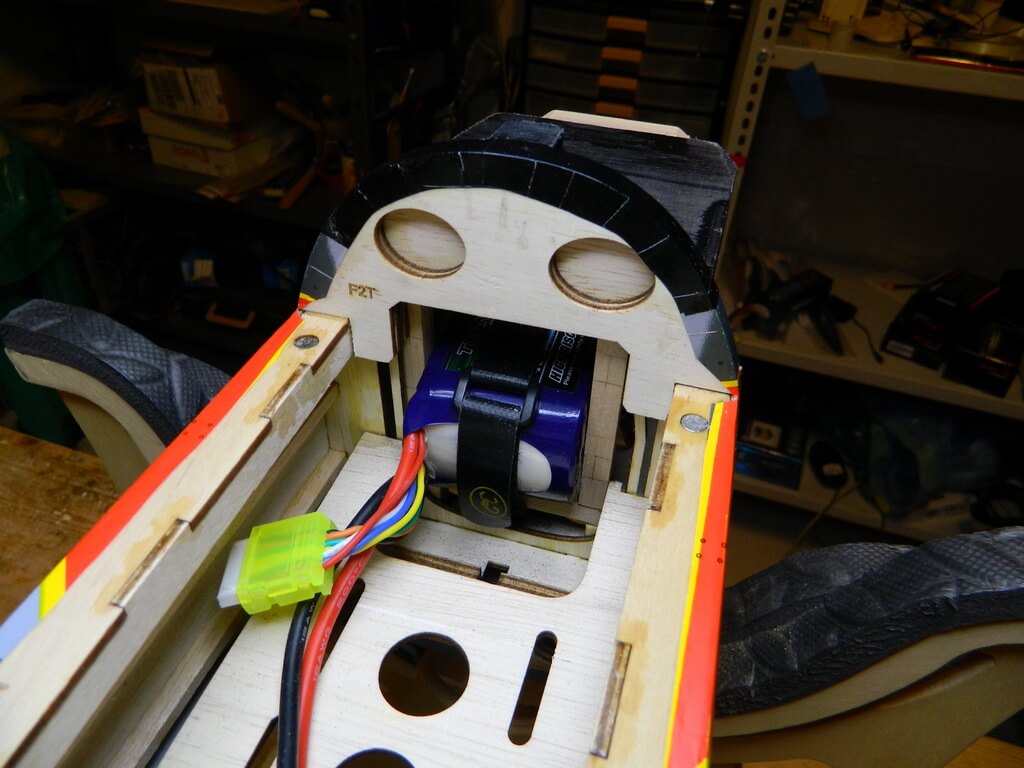
I quadrelli di tiglio da 10mm di spessore, visibli nelle due foto precedenti, servono ovviamente a contenere il pacco batteria. Non sono aderenti al pacco ma forniscono il giusto grado di libertà anche per evitare difficoltà di inserimento del pacco nel caso dovesse gonfiare un poco.
Disposizione dell'elettronica
In questo modello ho utilizzato i seguenti sensori
La sequenza di connessione è la seguente: ASS-70 -> GPS -> Vari-H -> RPM -> FCS-150A -> FLVSS -> Ricevitore S8R
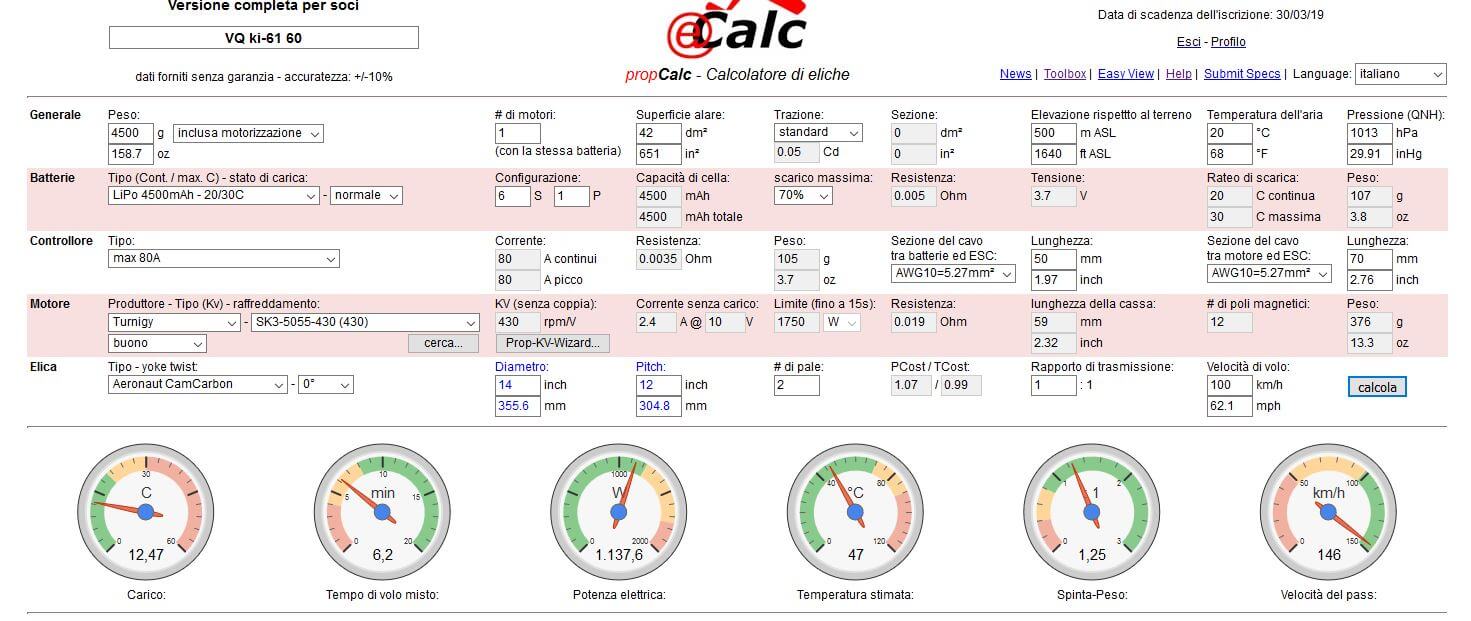
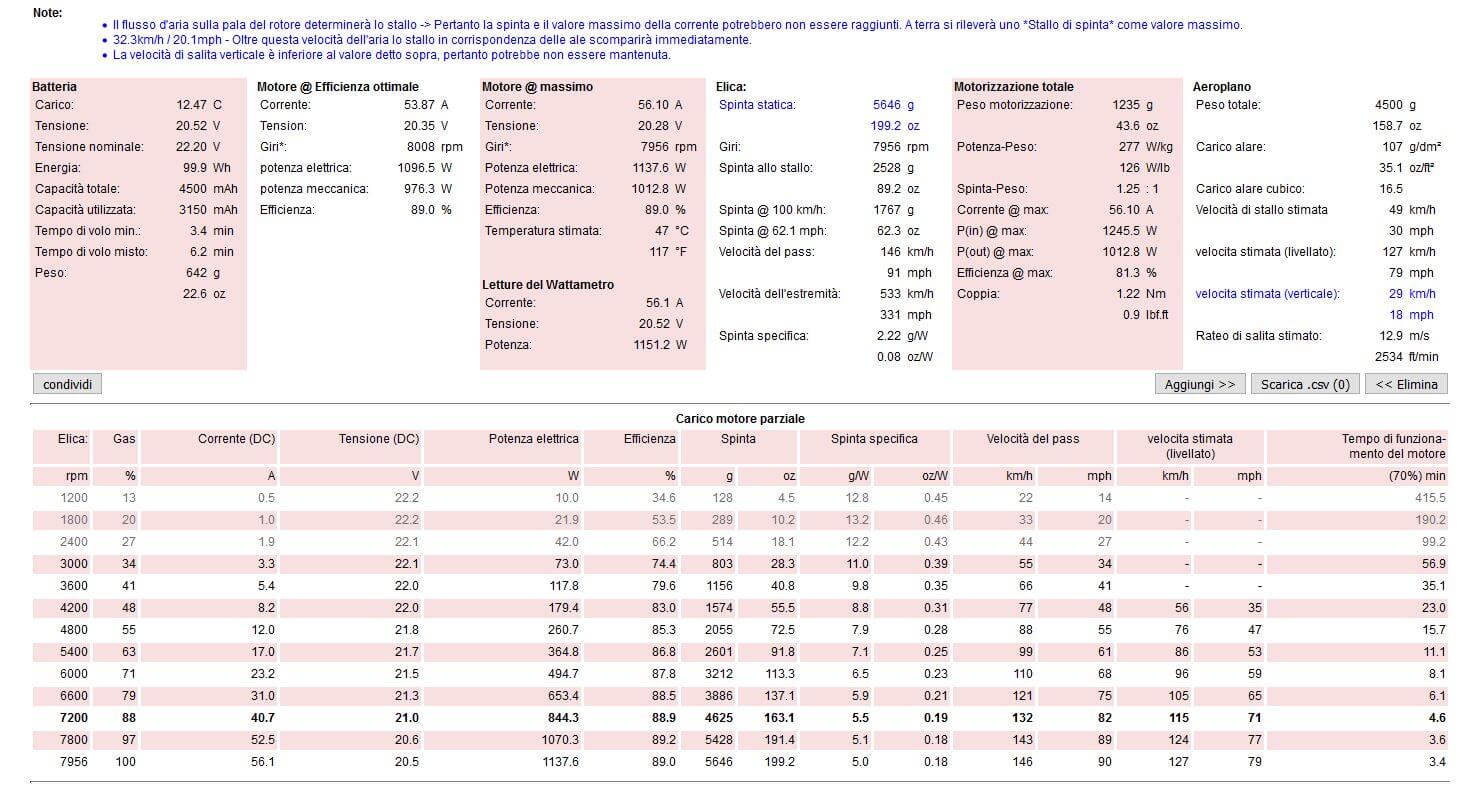
Il regolatore utilizzato e lo YEP 80A programmato mediante la scheda di programmazione dedicata, motore Turnigy SK3 5055 430Kv ed elica Aeronaut Camcarbon da 14 x 12.




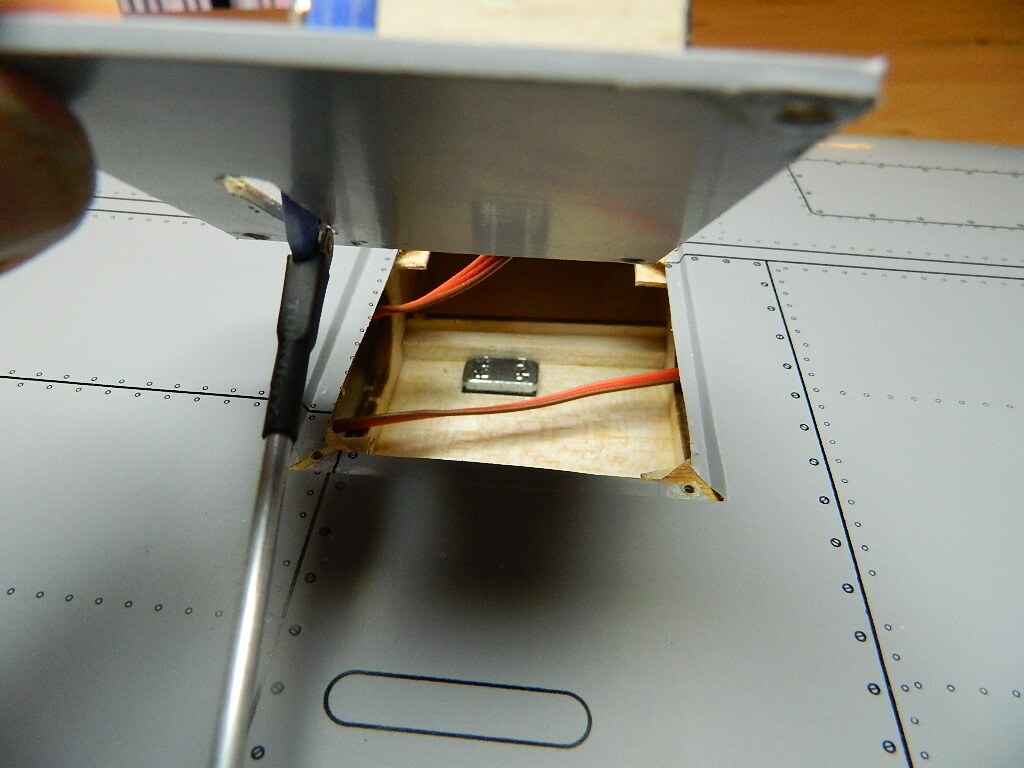
Il ricevitore
Ho già avuto modo di toccare con mano i vantaggi del volo assistito dalla stabilizzazione quindi ho deciso di utilizzare per tutti i miei modelli il ricevitore S8R. Nel manuale a corredo non si indica con precisione il posizionamento all'interno della fusoliera ma altrove ho letto che è consigliabile posizionarlo nel baricentro o nelle immediate vicinanze. Visto che la batteria risulta molto spostata in avanti rispetto alla posizione prevista dalla VQ, allora è possibile piazzare il ricevitore molto vicino al baricentro.
Come in tutti gli altri modelli, utilizzo 4 magneti per fissare il ricevitore nella fusoliera. Molti storcono il naso quando sentono parlare di questo tipo di fissaggio perchè credono che il campo magnetico dei 4 magneti disturbi il corretto funzionamento del ricevitore ma ovviamente si sbagliano perchè non hanno chiari i concetti di campo magnetico statico e di quello variabile.

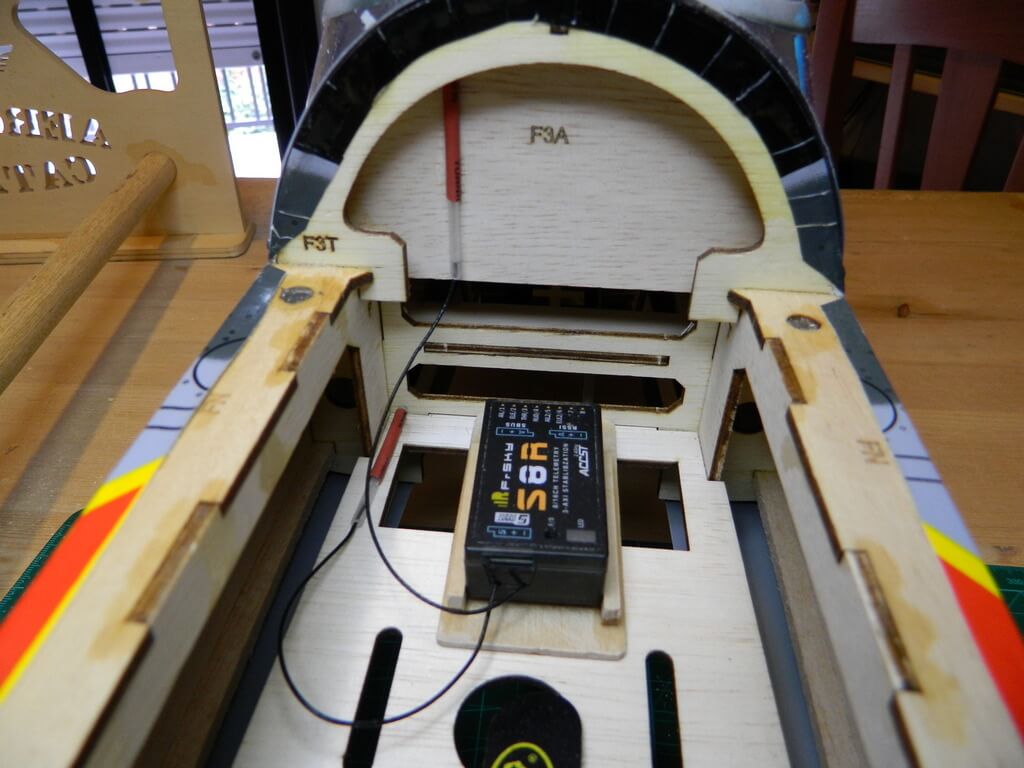
Le 2 antenne sono state fissate con una goccia di ciano dentro 2 spezzoni di bowden. In questo modo si possono inserire ed estrarre facilmente dagli spezzoni di termoretraibile incollati nella fusoliera per ottenere le giuste polarizzazioni. La disposizione delle antenne non è casuale. Le 2 antenne non vengono usate contemporaneamente dal ricevitore ma ne funziona solo una fra le due (antenna diversity). Il ricevitore effettua la scelta dell'antenna migliore in quel dato momento in funzione del miglior segnale ottenibile. In questa modalità si ottengono le migliori prestazioni disponendo le due antenne a 90° come visibile nella foto. La peggiore configurazione si ottiene disponendo le 2 antenne parallelamente.
Le ali
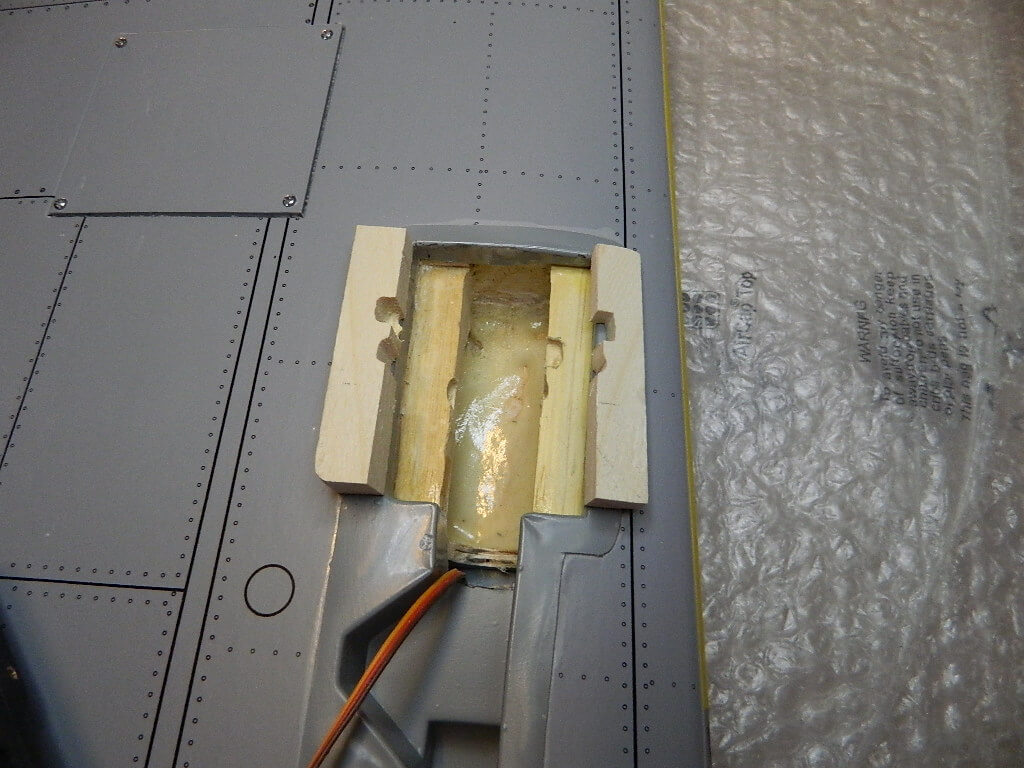
Nelle ali, il lavoro più rognosetto è quello relativo al montaggio dei retrattili. La zona retrattili è anche quella sollecitata maggiormente e quella a rischio rottura durante l'atterraggio. Nei modelli precedenti che ho distrutto ho potuto notare che, a volte, gli incollaggi dei supporti (quadrello di ajous) per i retrattili non sono perfetti. Conseguentemente cerco di rinforzare le zone interne spalmando abbondante colla poliuretanica che espandendosi riesce a raggiungere spazi angusti.





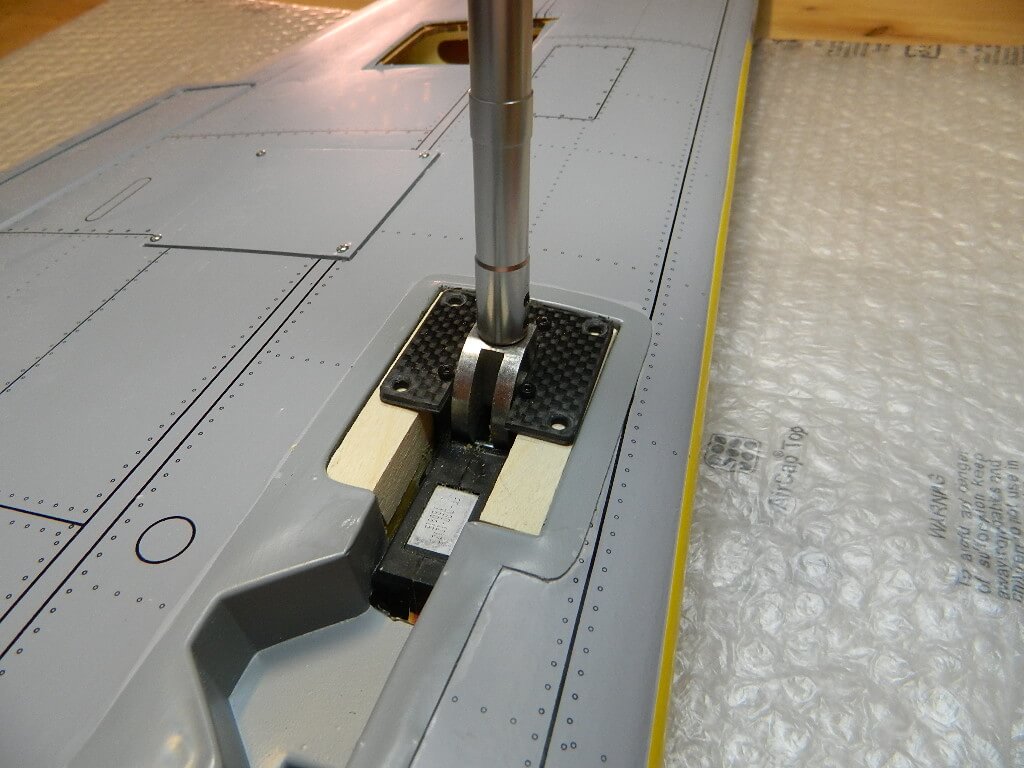
I servi per i retrattili sono gli stessi usati per gli altri modelli VQ. Questi servi sono economici ma su aeromodelli che pesano 4,5 Kg bisogna sostituire la piastra di montaggio originale perchè il materiale di cui è composta (plastica dura) si spacca facilmente se non si eseguono atterraggi a regola d'arte. L'ideale sarebbe rifarli di alluminio ma la mia cnc non è adatta alle lavorazioni di metalli quindi li ho ricavati da una lastra di carbonio da 2,5mm.
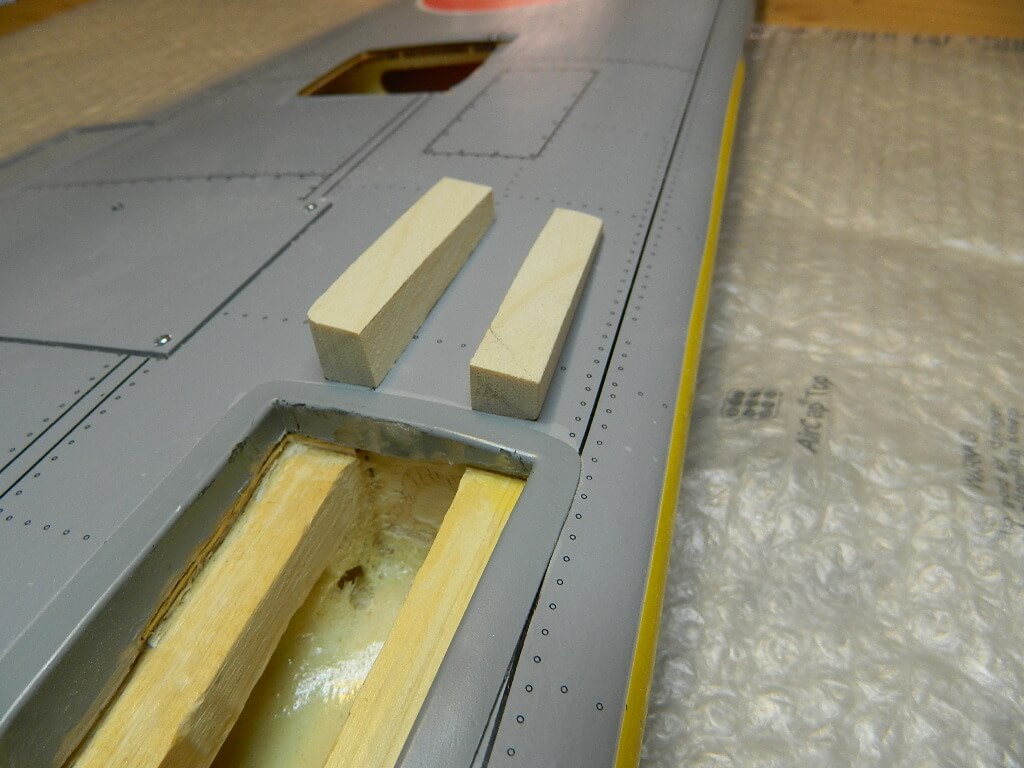
Un altra piccola modifica è stata quella di sostituire i grani del servo usati per bloccare la gamba con bulloncini da 3mm a testa esagonale. Questa scelta obbliga a realizzare delle sedi ulteriori nei blocchetti di legno (koto - ajous) che fungono da spessori come visibile nelle foto.
Gambe
Trovare una coppia di gambe idonee che siano resistenti ed anche economiche non è facile. Quelle a corredo sono inutilizzabili perchè il tondino ha un diametro di 4mm. Troppo morbide per resistere, senza deformarsi subito, sotto il peso del modello. Quelle consigliate dalla VQ non mi piacciono perchè qualitativamente scadenti. Non trovando altro ho dovuto ripiegare su un paio di gambe in alluminio di HobbyKing.
Non sono molto entusiasta perchè ammortizzano solo in una direzione ovvero perpendicolarmente al suolo. Preferirei utilizzare una coppia di gambe come quelle a corredo, con il ricciolo, ma con un diametro dell'acciaio di 5mm.
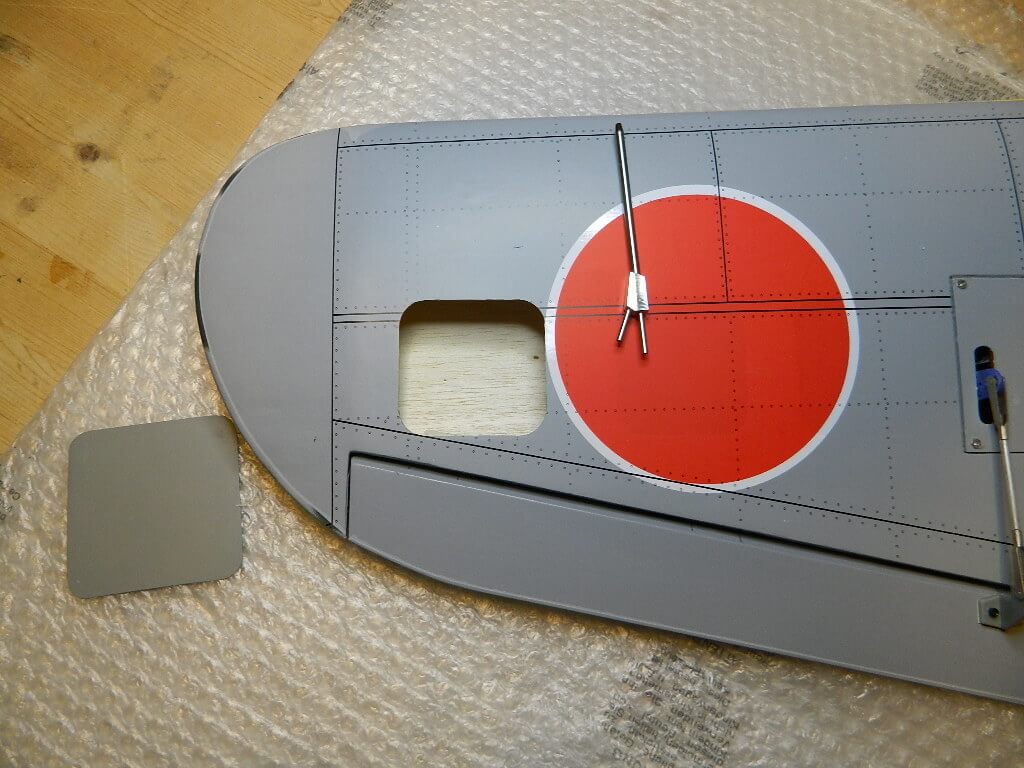
Tubo di Pitot
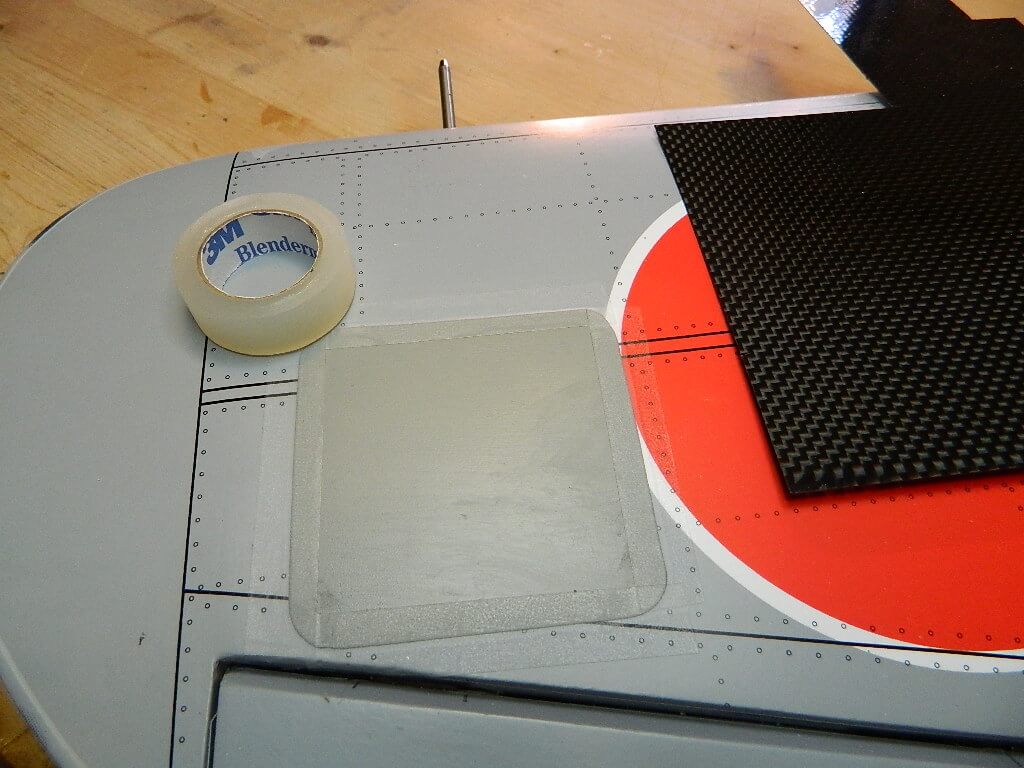
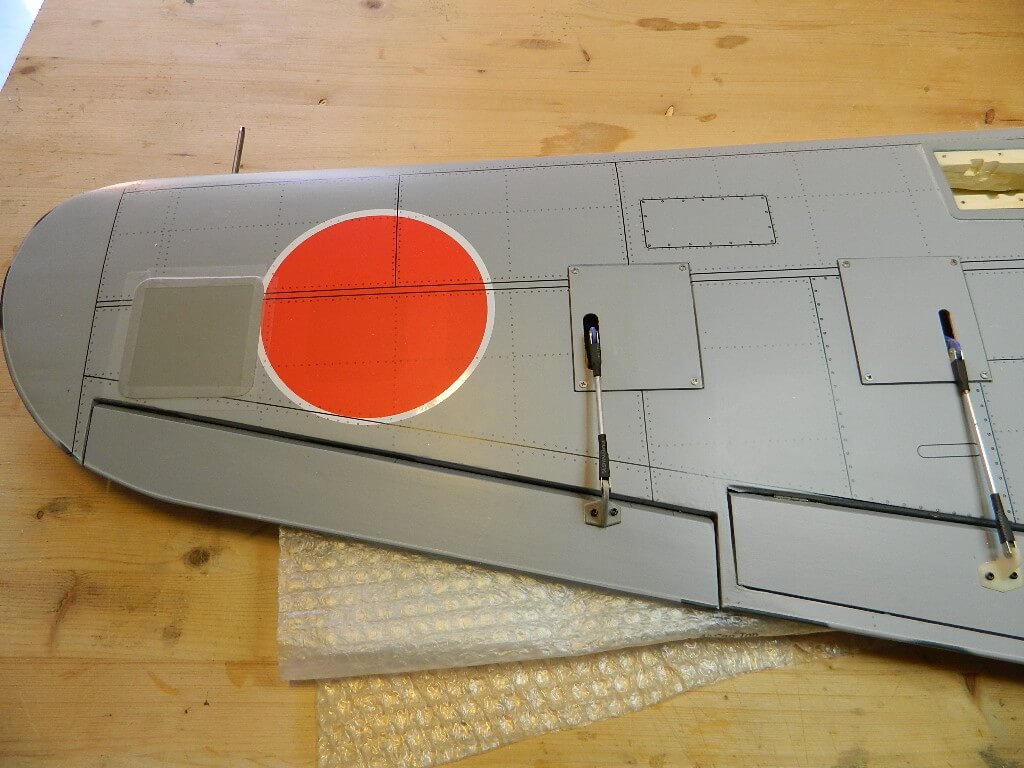
Il sensore è stato posto il più lontano possibile dalla turbolenza generata dall'elica.
Ho approfittato del fatto che la superficie inferiore dell'ala non fosse completamente rivestita di balsa ma presenta alcuni alleggerimenti. Ho intercettato l'alleggerimento più vicino all'estremità alare ed ho rimosso il rivestimento. Per realizzare lo sportellino rimovibile ho usato un fogliettino di carbonio da 0.2mm di spessore. Lo sportellino è fissato mediante l'ottimo nastro adesivo Blenderm della 3M.
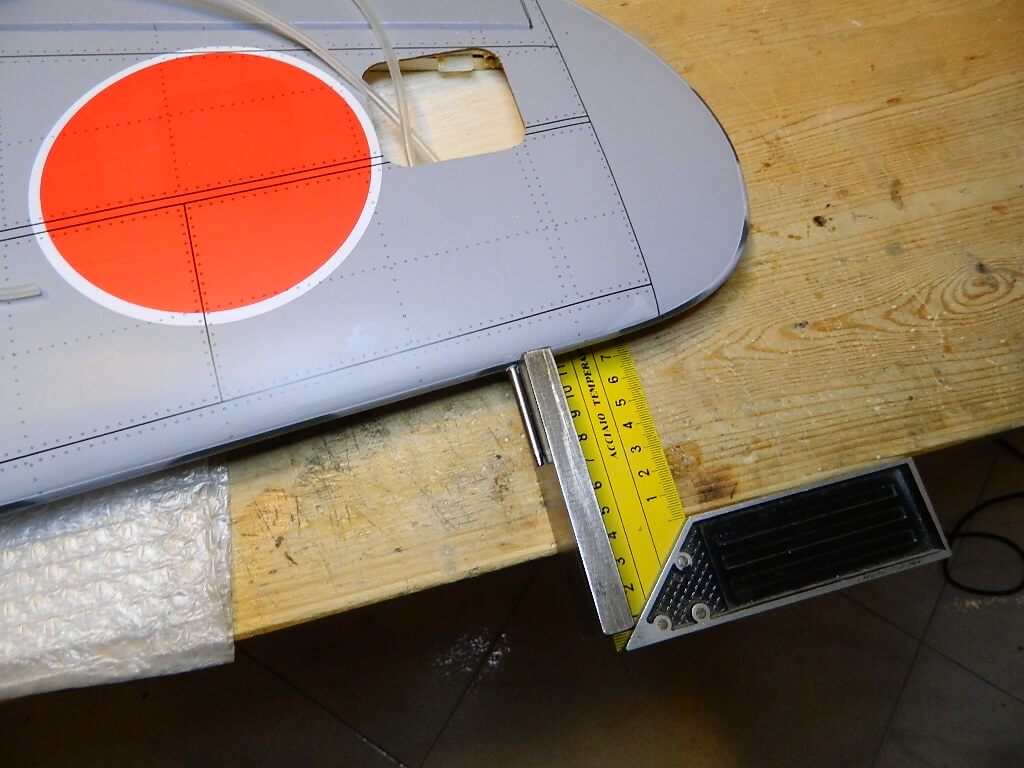
Per avere indicazioni realistiche, il tubo di Pitot dovrebbe essere parallelo all'asse di rollio (x) e perpendicolare all'asse di imbardata del modello (z). Il parallellismo all' asse x l'ho ottenuto facilmente prendendo la centina radice come riferimento. La perpendicolarità all'asse z l'ho fissata ad occhio...
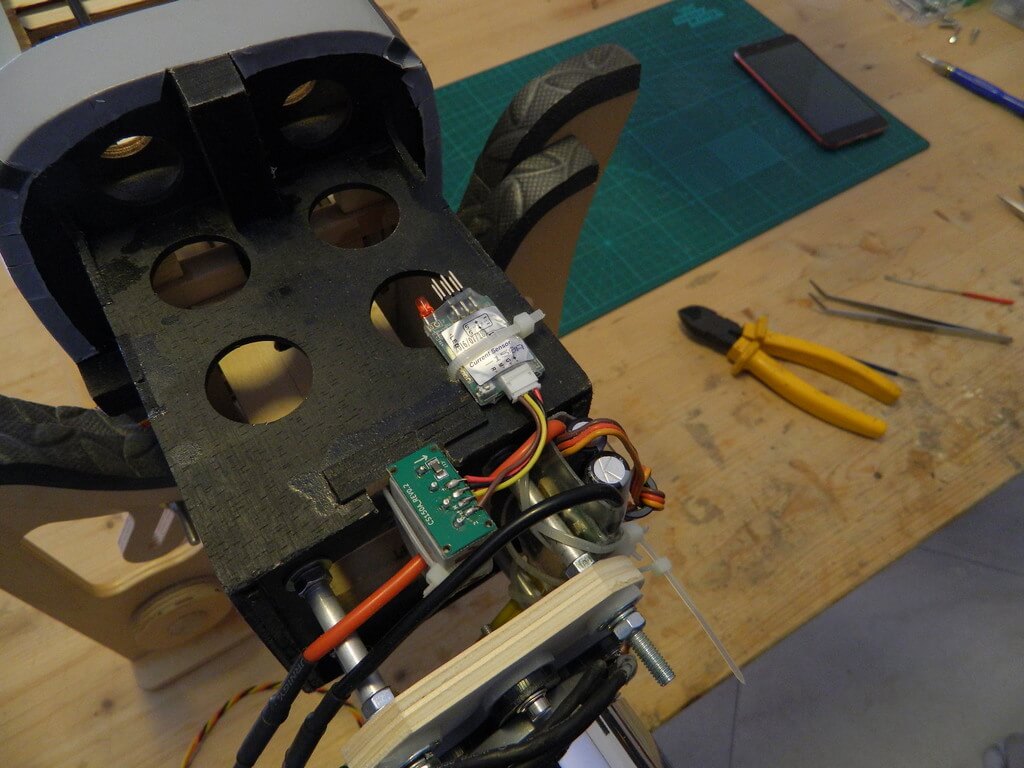
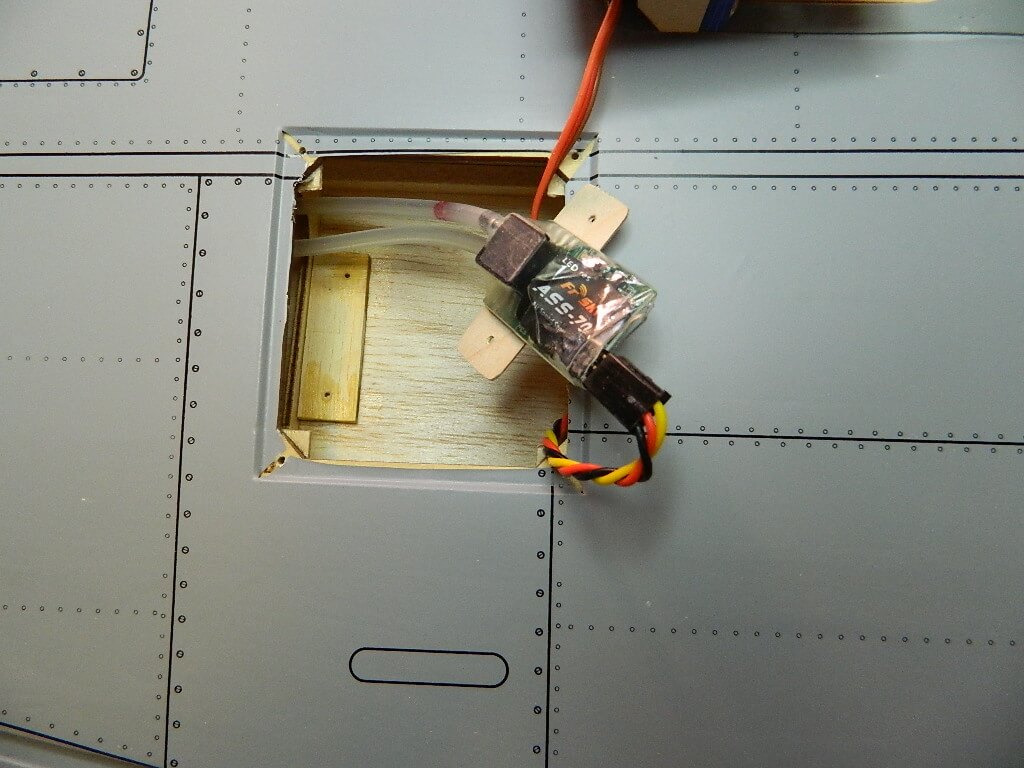
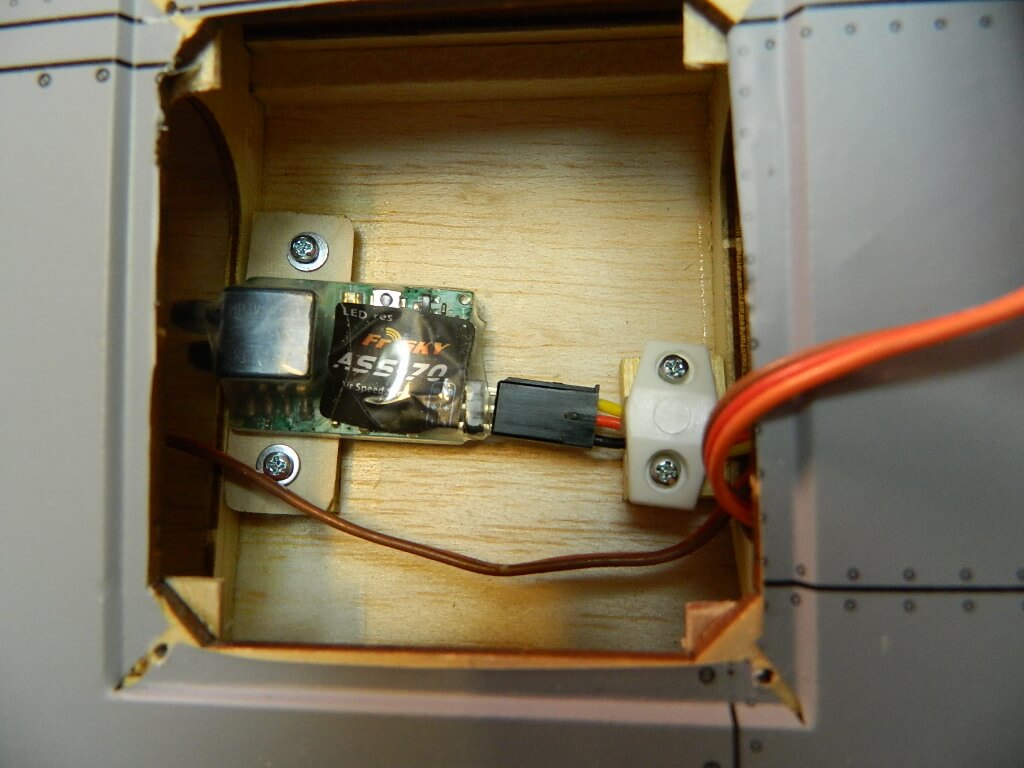
Il circuito elettronico del sensore l'ho alloggiato sotto il servo del flap.


Unione ali e bilanciamento
L'incollaggio delle ali è stato eseguito con la classica UHU PLUS endfest 300 come sempre.

Per evitare di maneggiare le 6 coppie di spinette delle ali, ho deciso di usare il sistema SBus. Ho abbandonato l'uso del vecchio decodificatore da 16 canali, a causa di diversi inconvenienti che presentava, ed ho adottato i decodificatori a 4 canali della FrSky che sono molto meglio. Ho destinato un decoder per ogni ala. Al posto del connettore ad Y ho preferito il semplice circuito stampato 🙂


Alla fine ho bilanciato staticamente le ali perchè risultavano una più pesante dell'altra.





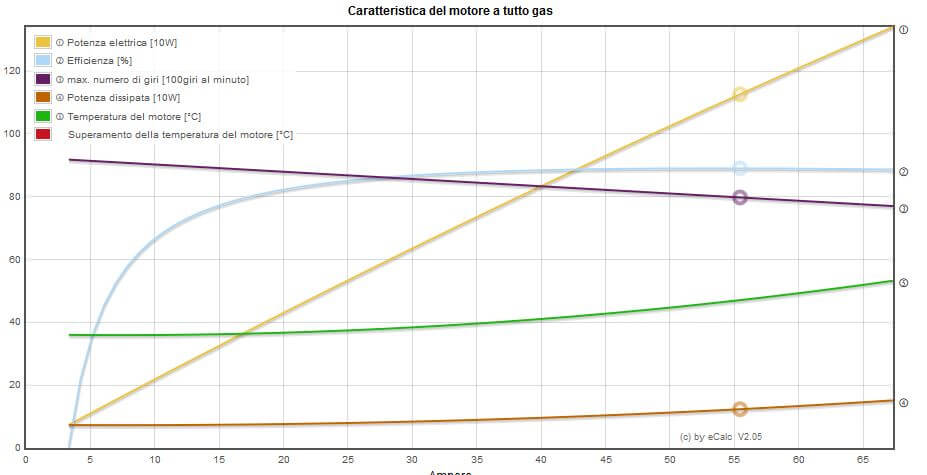
Caratteristiche calcolate con eCalc (registrato)